

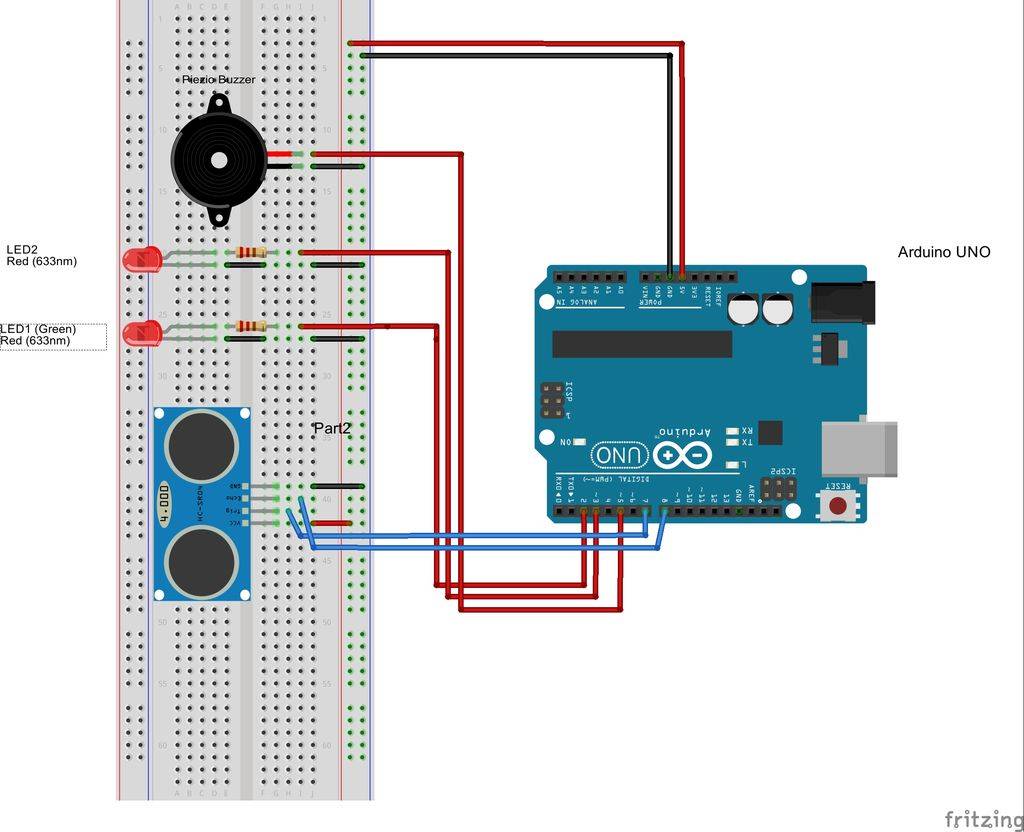
Step 2: Setup
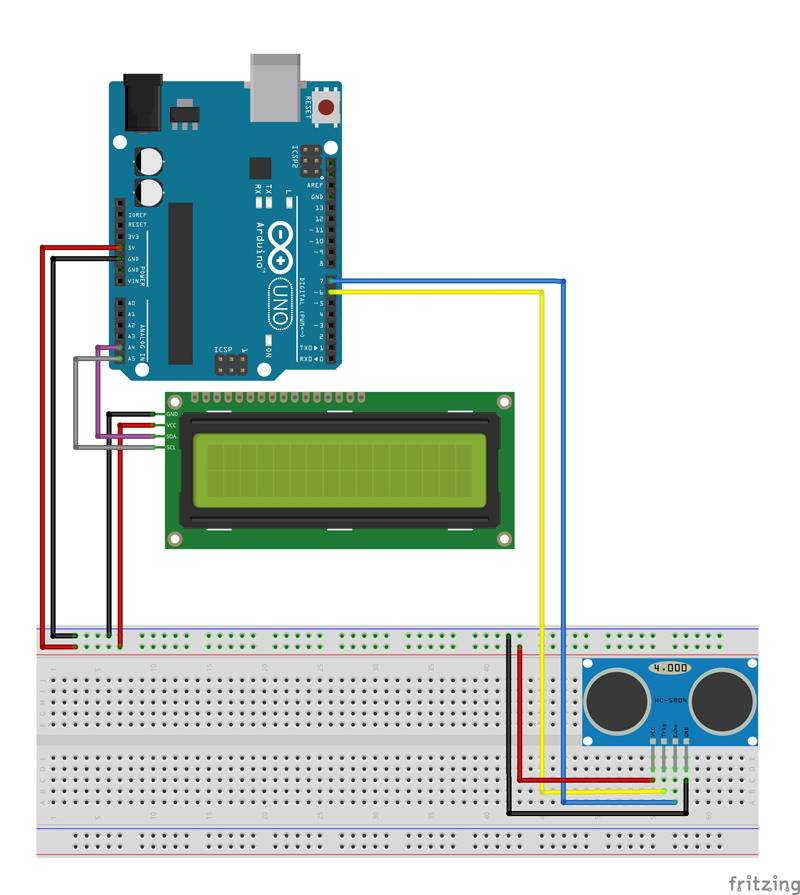
The photo above shows the setup of the project. The jumper wires should be connected as follows: Connect a jumper wire from the 5 volt pin on the Arduino to the bottom channel of the breadboard Connect another jumper wire from a ground pin on the arduino to the upper channel of the breadboard Buzzer -> pin 3 (On Ultrasonic Sensor) Echo -> pin 6 Trig -> pin 7 (In Order from Right to Left) LED1 -> pin 8 LED2 -> pin 9 LED3 -> pin 10 LED4 -> pin 11 LED5 -> pin 12 LED6 -> pin 13 The jumper wires connected to the LEDs should be connected to the lead on the right, while the left lead of the LED should connected to the ground channel via a 330 ohm resistor.
Запуск и настройка
При первом запуске устройства происходит следующее:
- Подается импульс на вход Trig.
- В самом датчике сигнал преобразуется в 8 импульсов, у которых частота достигает 40 кГц, их он, соответственно, и посылает вперёд.
- Доходя до препятствия, импульсы отражаются и возвращаются на приемник, происходят моментальные расчеты в МК, и вся информация подаётся на устройство вывода. В нашем случае – это консоль ПК, но в будущем мы сделаем урок, где данные будут выводиться на LED-экранчик.
При первом запуске мы используем линейку, которая позволит сравнить точность измерений. Запустив устройство, проверьте данные, которые будут выведены в консоли.
Датчик пользуется большой популярностью и всё больше людей пишут свои решения для работы с ним.
Входное напряжение 5 В постоянного тока, подаётся на выводы Vcc и GND датчика.
Ультразвуковой дальномер Arduino HC-SR04
Ультразвуковой датчик (ещё его часто называют сонаром или ультразвуковым дальномером) определяет расстояние до объекта так же, как это делают летучие мыши или дельфины. Датчик HC-SR04 генерирует узконаправленный сигнал на частоте 40 кГц и ловит отраженный сигнал (эхо). По времени распространения звука до объекта и обратно можно достаточно точно определить расстояние до него.
По этому же принципу работает множество приборов для исследования пространства — эхолот, сонар, радиолокатор и даже полицейский радар для определения скорости автомобиля. Все эти приборы излучают узконаправленный ультразвуковой сигнал и получают обратно отраженный сигнал. В отличии от инфракрасных дальномеров (IR), на показания ультразвукового датчика (сонара) не влияет цвет объекта.
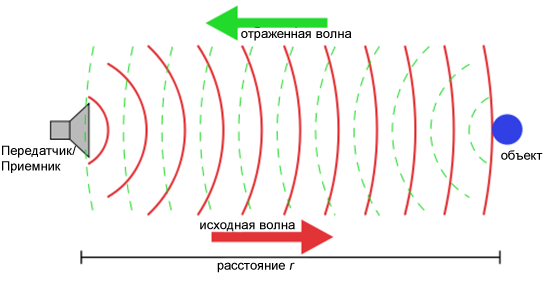
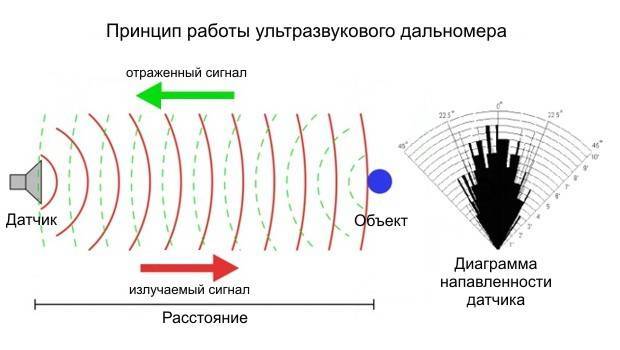 Принцип работы ультразвукового дальномера HC-SR04
Принцип работы ультразвукового дальномера HC-SR04
Но при настройке ультразвукового датчика на Ардуино могут возникнуть трудности с определением расстояния до звукопоглощающих объектов, поскольку они способны полностью погасить излучаемый сигнал. Для идеальной точности измерения расстояния, поверхность изучаемого объекта должна быть ровной и гладкой. Принцип работы ультразвукового датчика hc-sr04 показан на рисунке выше.
Ультразвуковые датчики расстояния (сонары)
Самое популярное и основное использование сонара – это «видеть» под водой. Для обнаружения объектов сонар использует распространение звука. Поскольку звуковые волны распространяются в воде дальше, чем в воздухе, то в этом случае использование сонара предпочтительнее, по сравнению с другими типами датчиков, такими как радар. Несмотря на то, что сонар предпочтителен для подводного зондирования, его всё равно можно использовать в воздухе; однако существует небольшая вероятность интерференции, которую мы можем наблюдать при измерении расстояния.
Существует два типа сонаров: пассивный и активный. Активный сонар имеет излучатель и детектор: в зависимости от времени, за которое сигнал возвращается к сонару, он может определить расстояние до объекта и его ориентацию. Он также определяет уровень сигнала, чтобы определить, сколько времени ему потребовалось для захвата приемником. Пассивные сонары используются для захвата сигналов от судов и других морских объектов, таких как киты и подводные лодки. Пассивные сонары не имеют излучателей; они просто принимают доходящие до них звуковые волны.
 Работа сонара
Работа сонара
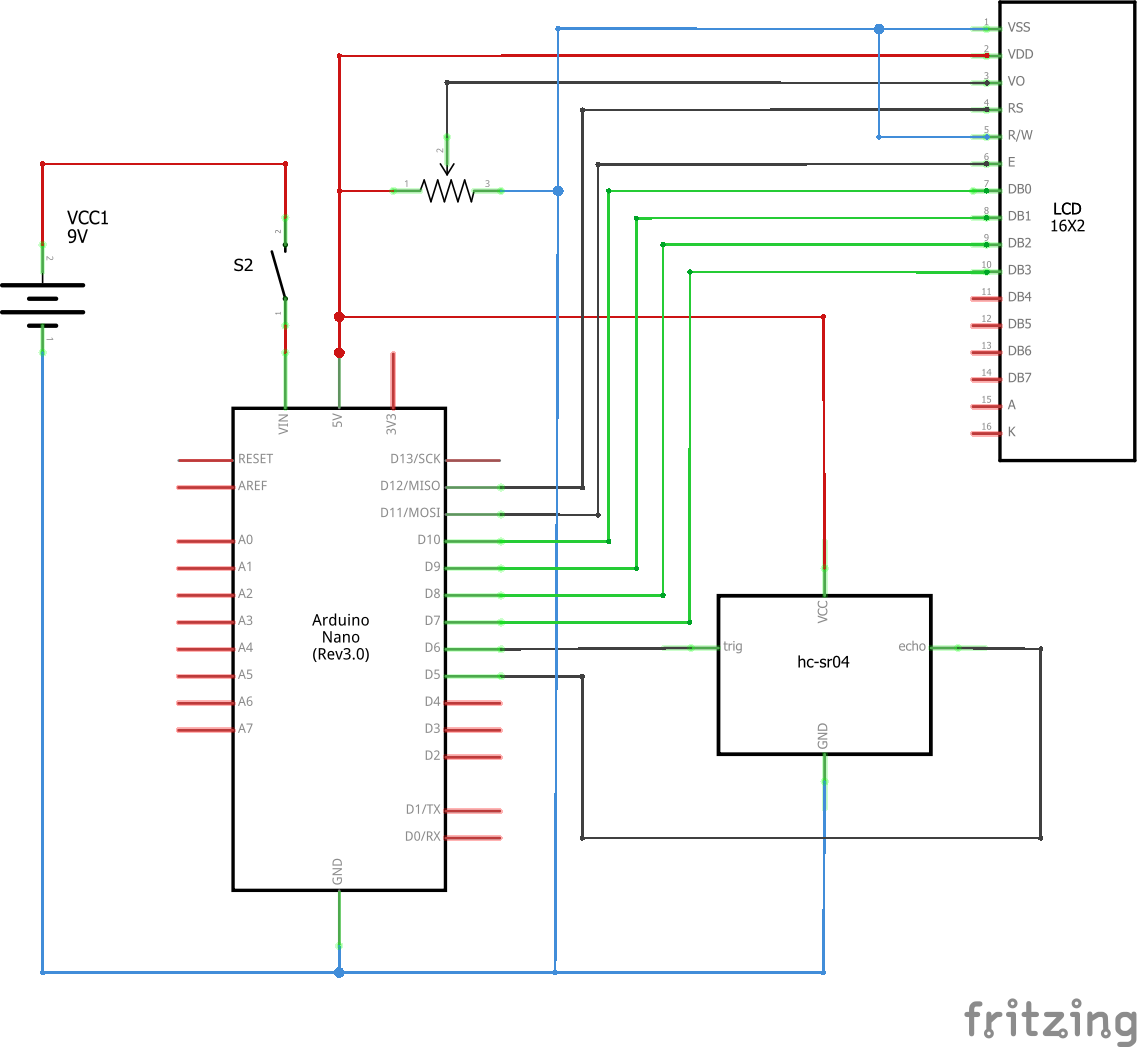
Полный код программы на Ардуино для датчика HC-SR04
#include <LiquidCrystal.h>
#define trigger 18
#define echo 19
LiquidCrystal lcd(2,3,4,5,6,7);
float time=0,distance=0;
void setup()
{
lcd.begin(16,2);
pinMode(trigger,OUTPUT);
pinMode(echo,INPUT);
lcd.print(” Ultra sonic”);
lcd.setCursor(0,1);
lcd.print(“Distance Meter”);
delay(2000);
lcd.clear();
lcd.print(” Circuit Digest”);
delay(2000);
}
void loop()
{
lcd.clear();
digitalWrite(trigger,LOW);
delayMicroseconds(2);
digitalWrite(trigger,HIGH);
delayMicroseconds(10);
digitalWrite(trigger,LOW);
delayMicroseconds(2);
time=pulseIn(echo,HIGH);
distance=time*340/20000;
lcd.clear();
lcd.print(“Distance:”);
lcd.print(distance);
lcd.print(“cm”);
lcd.setCursor(0,1);
lcd.print(“Distance:”);
lcd.print(distance/100);
lcd.print(“m”);
delay(1000);
}
1 | #include <LiquidCrystal.h> #define trigger 18 LiquidCrystal lcd(2,3,4,5,6,7); floattime=,distance=; voidsetup() { lcd.begin(16,2); pinMode(trigger,OUTPUT); pinMode(echo,INPUT); lcd.print(” Ultra sonic”); lcd.setCursor(,1); lcd.print(“Distance Meter”); delay(2000); lcd.clear(); lcd.print(” Circuit Digest”); delay(2000); } voidloop() { lcd.clear(); digitalWrite(trigger,LOW); delayMicroseconds(2); digitalWrite(trigger,HIGH); delayMicroseconds(10); digitalWrite(trigger,LOW); delayMicroseconds(2); time=pulseIn(echo,HIGH); distance=time*34020000; lcd.clear(); lcd.print(“Distance:”); lcd.print(distance); lcd.print(“cm”); lcd.setCursor(,1); lcd.print(“Distance:”); lcd.print(distance100); lcd.print(“m”); delay(1000); } |

Необходимые детали и узлы
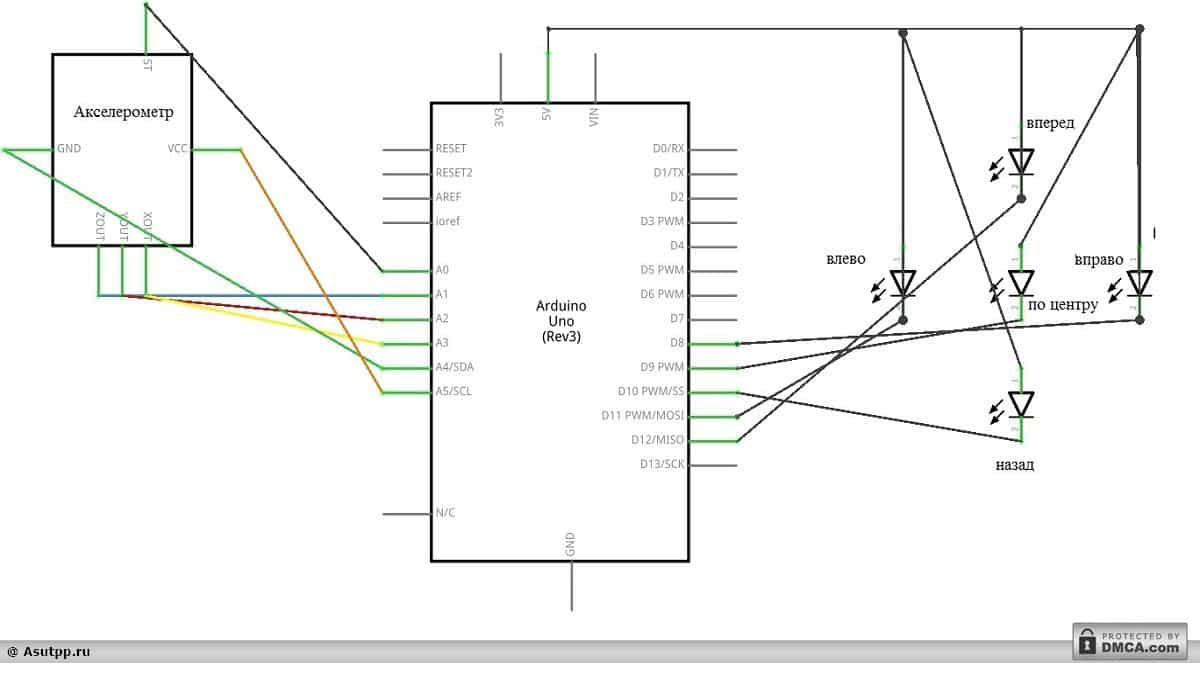
Прежде чем приступить к сборке квадрокоптера своими руками, необходимо обзавестись всеми необходимыми деталями. Мозгом нашей самоделки станет полетный контроллер Arduino Uno. Его возможностей более чем достаточно для того, чтобы управлять беспилотником.

Помимо микроконтроллера, нам понадобятся:
- Аккумулятор (лучше несколько) на 3.7В
- Плата MPU-6050 (на ней установлены гироскоп и акселерометр)
- Транзистор ULN2003A
- Коллекторные двигатели с полым ротором 0820
- Провода
Необходимо сделать несколько замечаний. Так как мы собираем дешевый самодельный дрон, то наш выбор пал на коллекторные движки с полым ротором (так называемые coreless motors). Они далеко не так надежны, как бесколлекторные двигатели, но зато гораздо дешевле стоят. Кроме того, можно обойтись без дополнительных контроллеров скорости.
Зато невозможно обойтись без гироскопа и акселерометра. Гироскоп необходим для того, чтобы квадрокоптер мог удерживать заданное направление движения, тогда как акселерометр используется для измерения ускорения. Без этих устройств управлять коптером было бы гораздо сложнее (если вообще возможно), так как именно они предоставляют данные для сигнала, регулирующего скорость вращения винтов.
Мы не указали в списке необходимых деталей раму. Ее можно приобрести, а можно распечатать на 3D принтере каркас, лучи и крепления для двигателей. Второй вариант нам кажется более предпочтительным, тем более, что в интернете можно без труда найти проекты квадрокоптера.
Пошаговая инструкция по подключению ультразвукового датчика к плате Arduino с нуля
Если вы хотите начать использовать ультразвуковой датчик на вашей плате Arduino здесь мы объясним, как выполнить эту процедуру быстро и легко. Учтите, что для этого вам понадобится только один Плата Arduino, это может быть любая модель карты, потому что процедура для всех одинакова. В этом случае мы будем работать с Плата Arduino UNO R3 .
Для этого просто выполните каждый из шагов, которые мы укажем ниже:
Первым делом нужно вставить ультразвуковой датчик в макет а с кабелями необходимо выполнить следующие подключения: «Срабатывание датчика на контакте 2 Arduino» et «Эхо датчика на выводе 3 Arduino».

При желании вы также можете подключить модуль напрямую к Arduino, не используя модель.
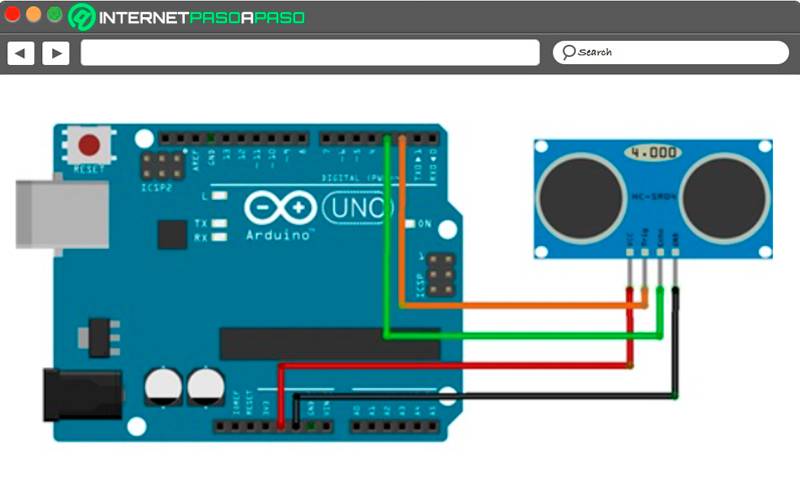
- Имейте в виду, что все эти подключения всегда должны выполняться с выключенным Arduino , поэтому рекомендуется отключите от ПК или любого другого внешнего источника.
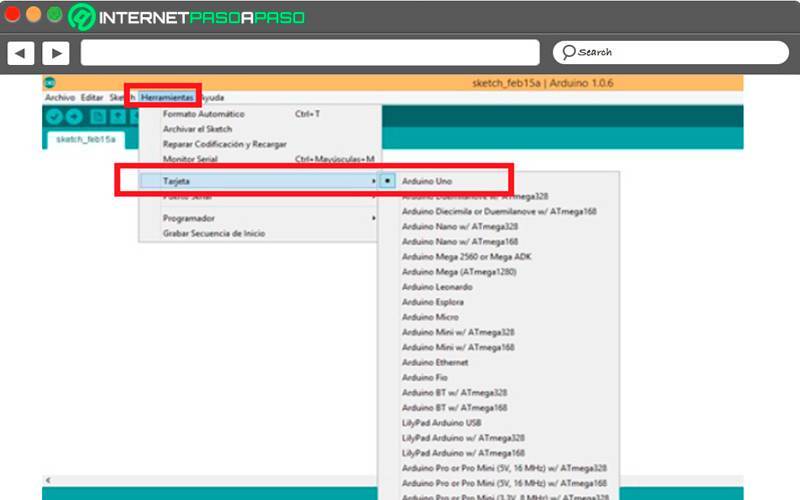
- Позже тебе придется откройте среду программирования Arduino , для них вам нужно перейти к опциям “Орудие труда” затем “Меню”, Оказавшись там, вам нужно выбрать модель используемой платы Arduino. В этом случае вариант «Ардуино Уно» будет выбран .
Когда IDE уже настроена, вы должны начать запланировать наш эскиз , чтобы вы могли лучше все это понять, поехали объясните весь код пошагово.
Первое, что нужно сделать, это настроить контакты и последовательную связь на 9800 бод:
Теперь из пустого цикла вам нужно начать с отправки импульса 10 мкс на триггер датчика:
Впоследствии ответный импульс от датчика будет получен через вывод Echo для измерения импульса, который мы используем функцию Pulseln:
В случае переменная t, вы будет время, необходимое для прибывает ультразвуковое эхо , теперь следующий шаг – вычислить расстояние между ультразвуковым датчиком и объектом.
Для этого следует использовать следующую формулу:
переменная “Скорость” – скорость звука 340 м / с, но в этом случае единицы измерения должны быть см / мкс, так как он будет работать в сантиметрах и микросекундах. Le “время” время, необходимое ультразвуку, чтобы достичь объекта и вернуться к датчику. И, наконец, переменная “Пройденный путь” вдвое больше расстояния до объекта, заменив все эти данные в формуле, мы получим следующее:

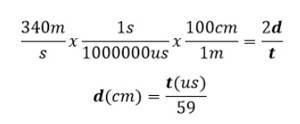
Enfin, значение расстояния должны быть отправлены серийно и закончим, поставив паузу 100ms , что выше, чем 60ms рекомендуемые техническими данными датчика.
Здесь вы можете увидеть полный код программы:
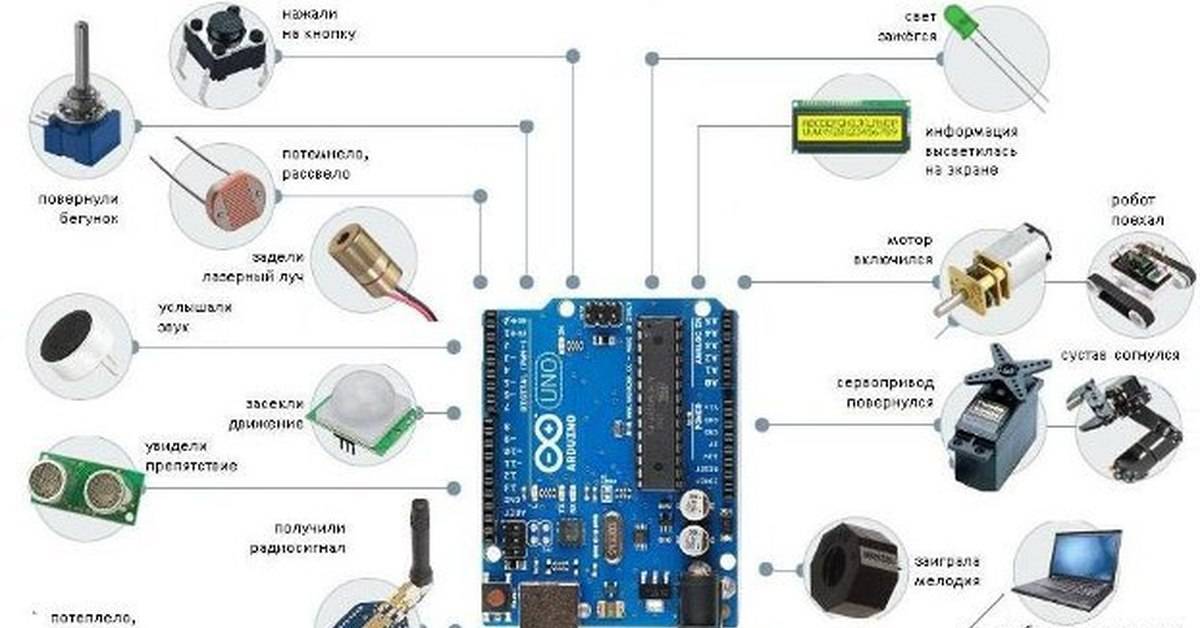
Датчик расстояния в проектах Arduino
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10-6 с.
Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
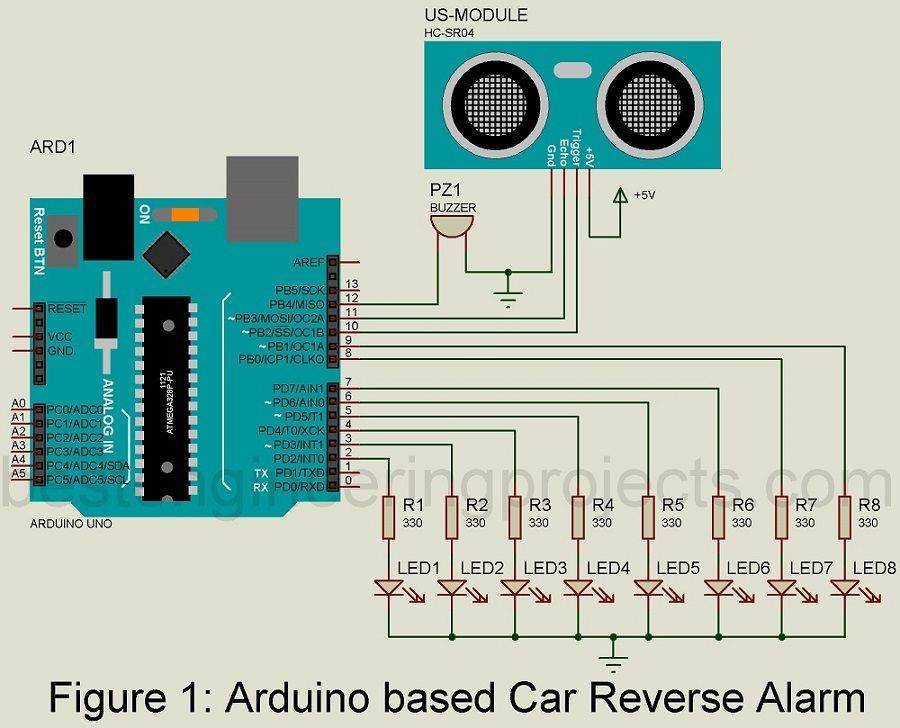
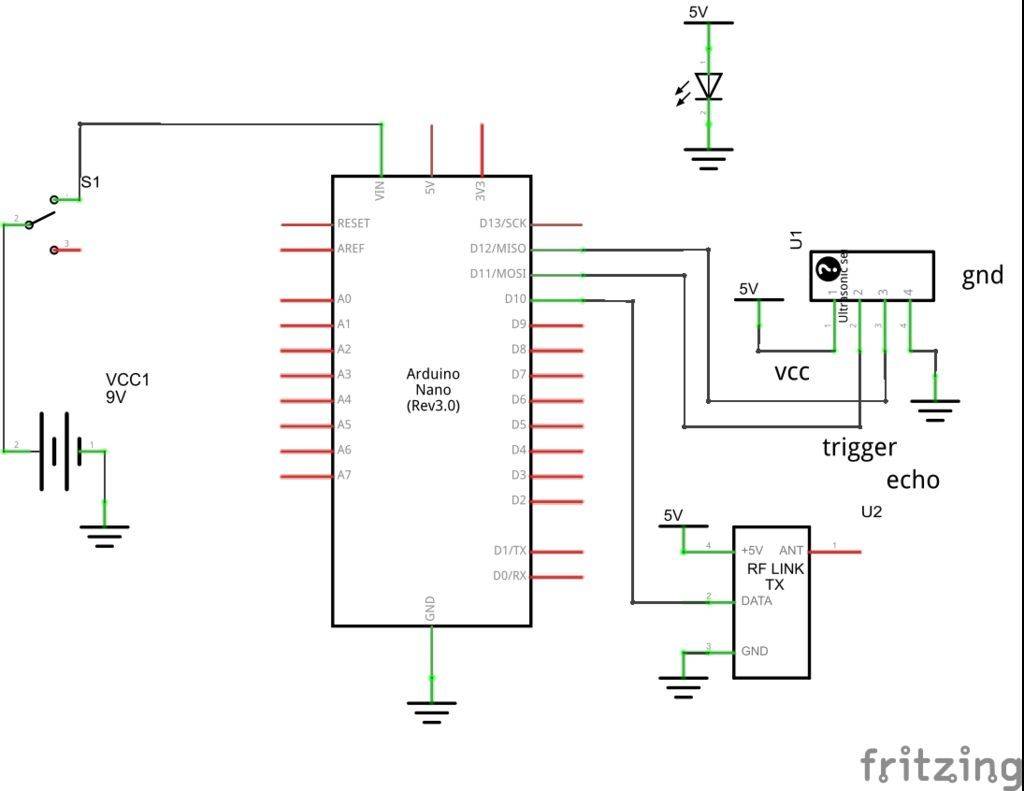
Схема взаимодействия с Arduino
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.
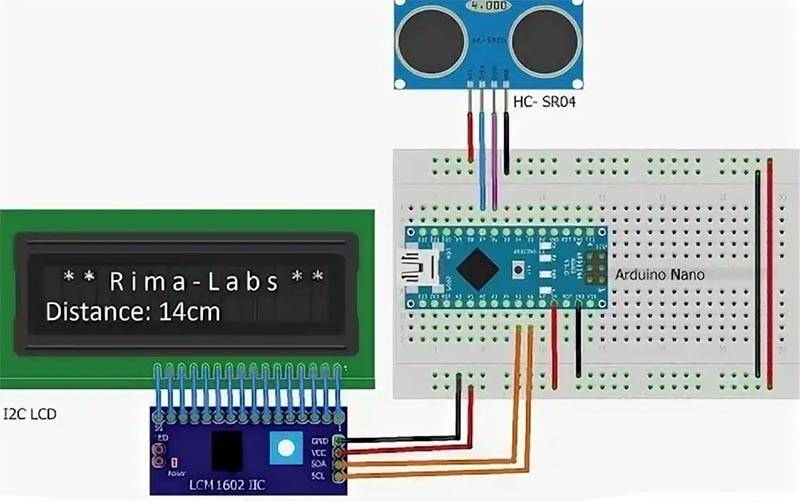
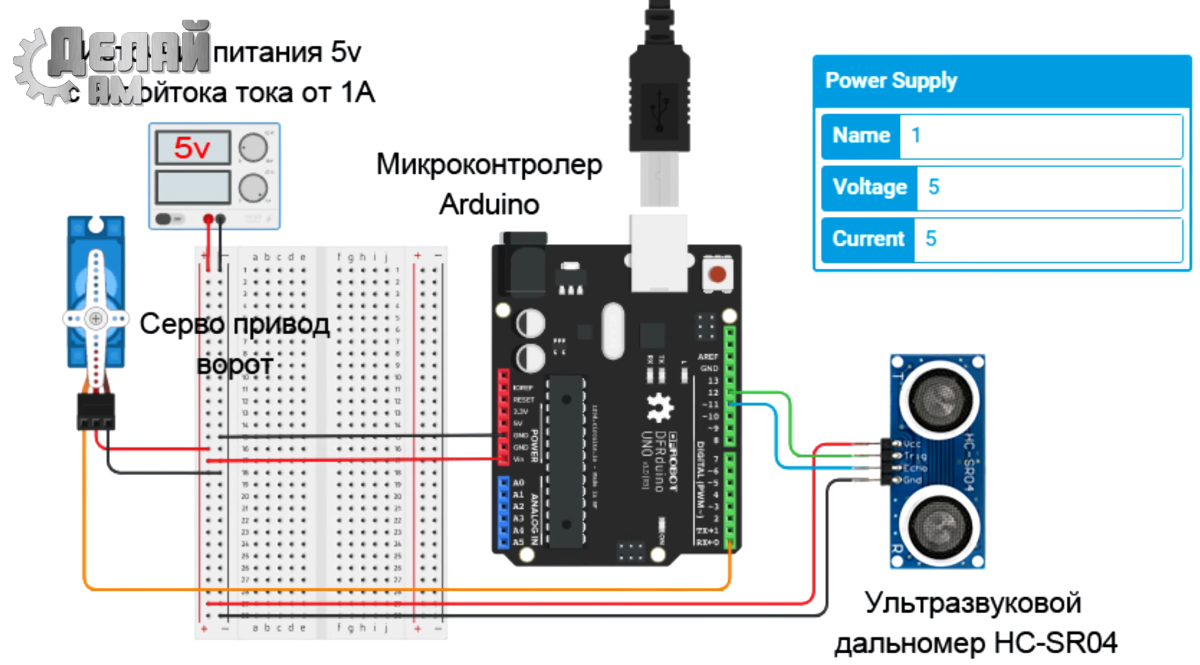
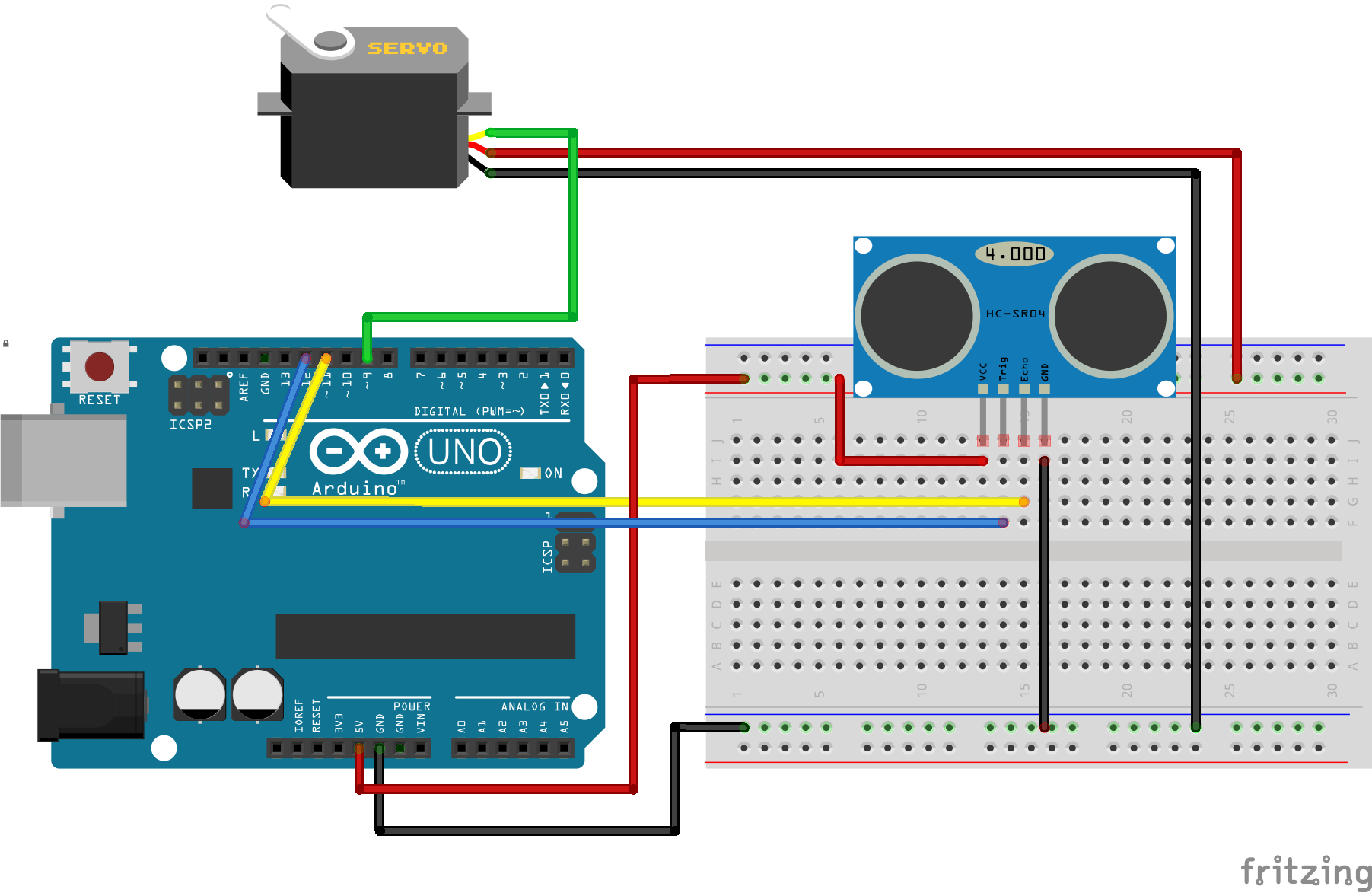
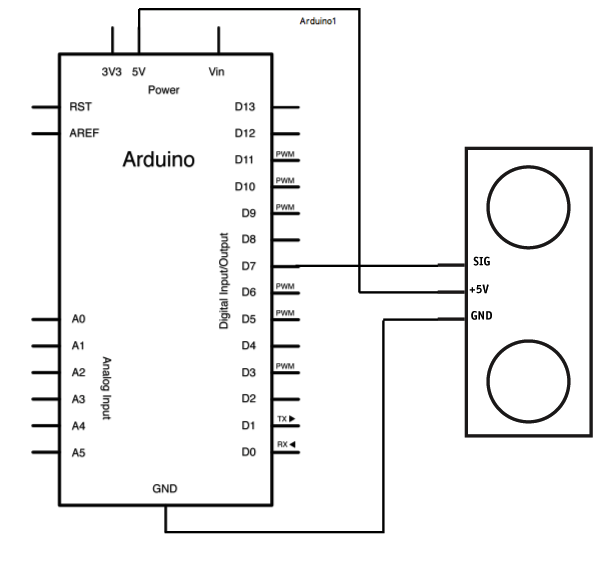
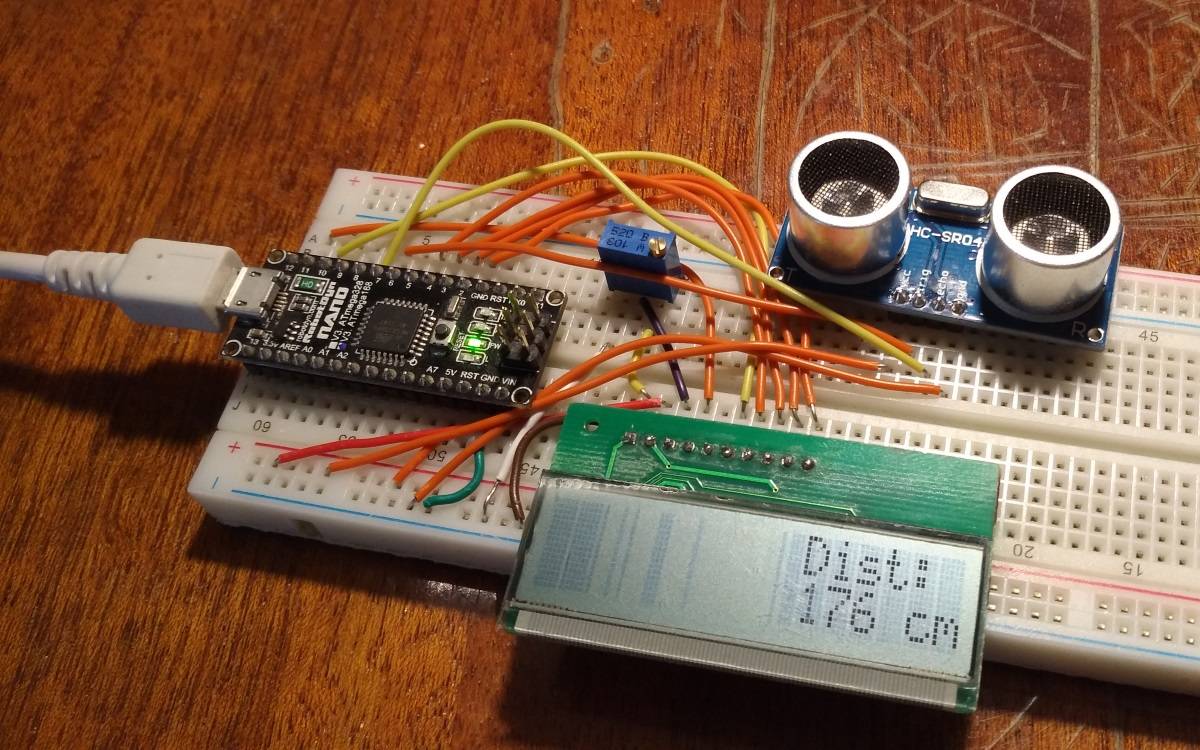
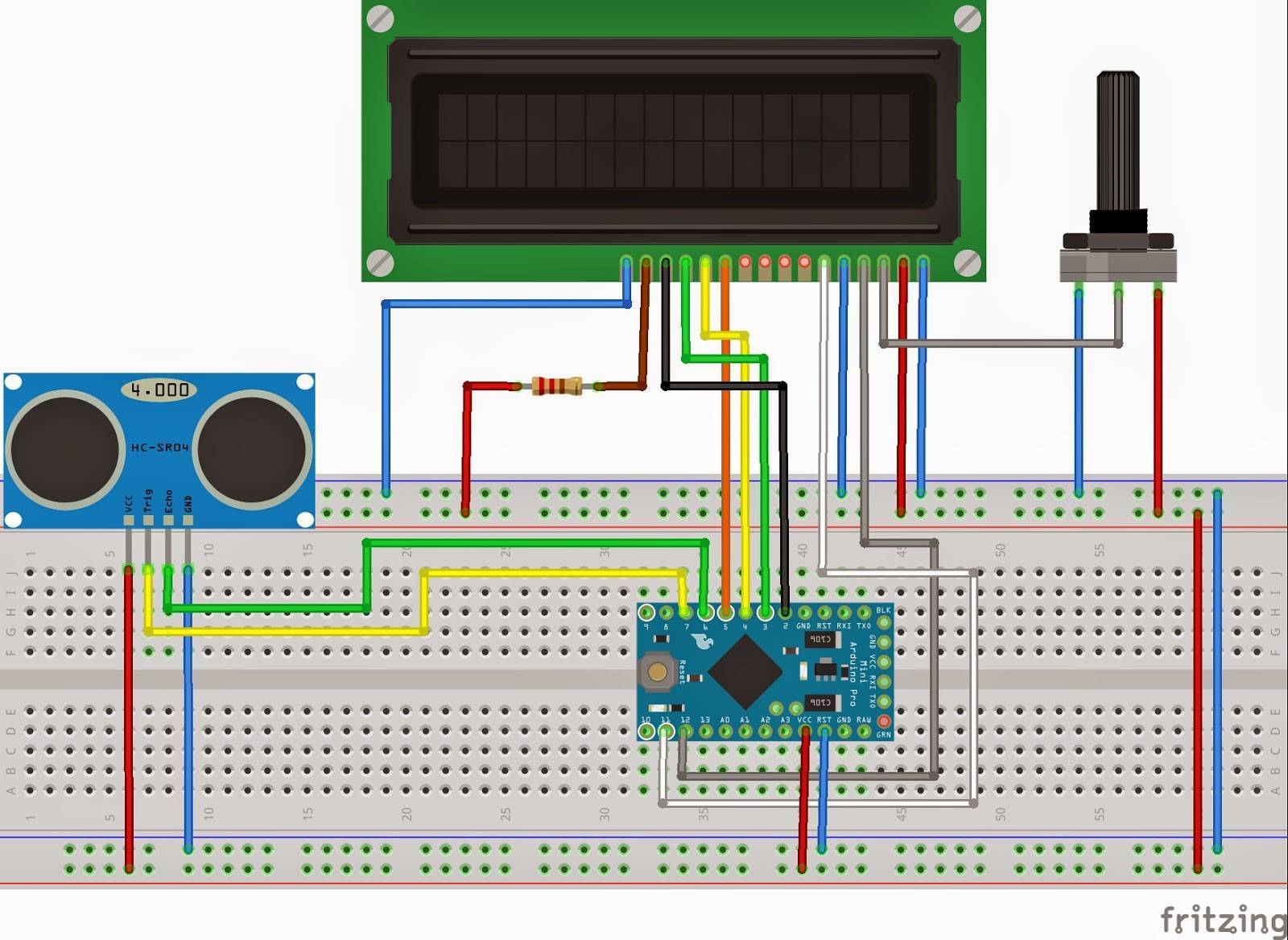
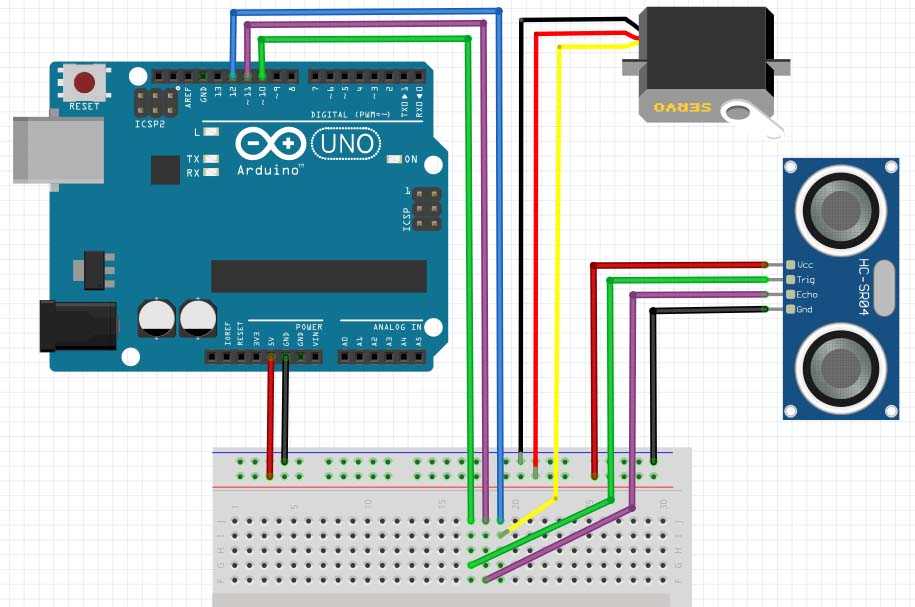
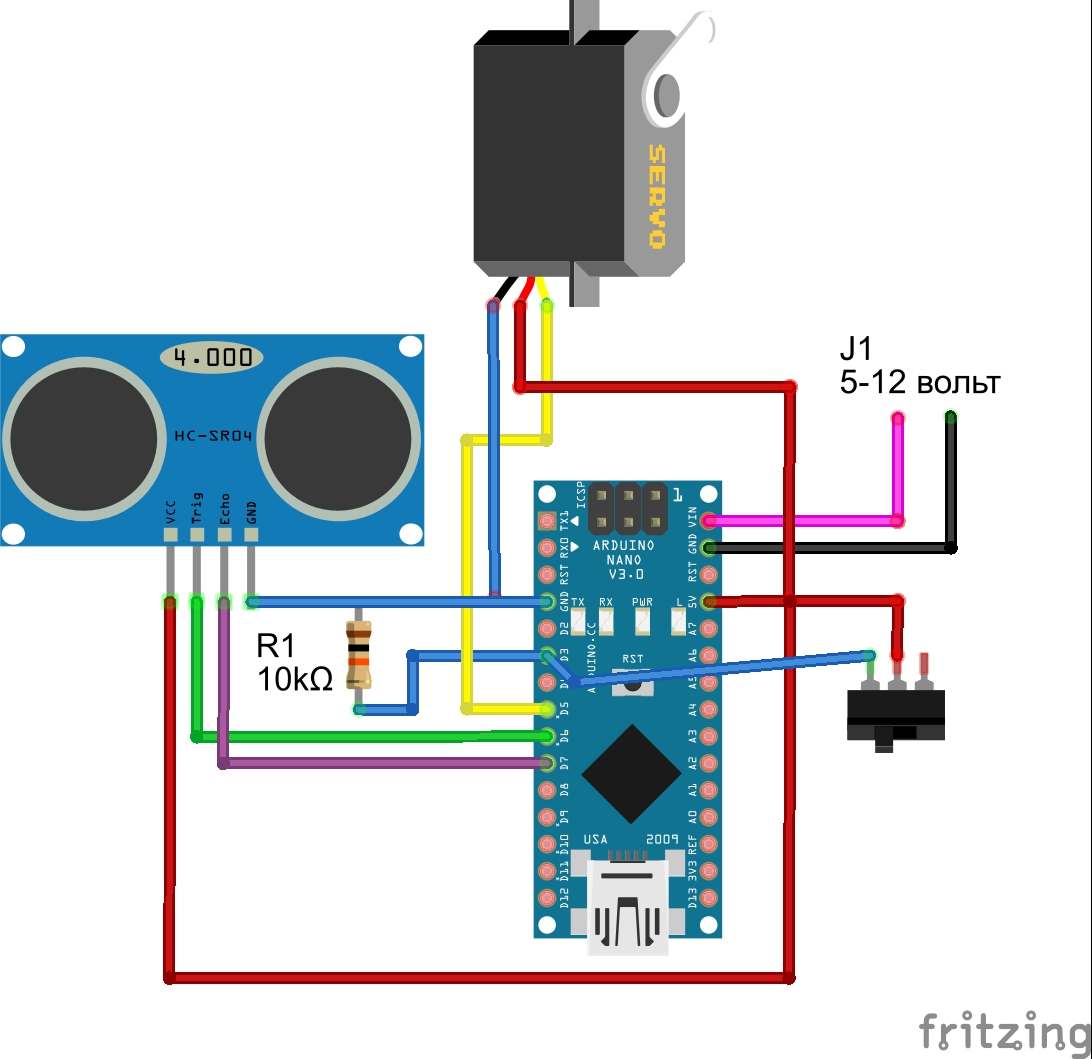
Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.
Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:
Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно здесь
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, DHT11 или DHT22) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Ультразвуковой дальномер своими руками
Можно создать ультразвуковой дальномер своими руками на базе контроллера Arduino. Для этого потребуется датчик, который будет измерять расстояние с помощью ультразвука. На рынке представлено несколько моделей, наиболее популярными и доступными из которых являются HC-SR04 и его улучшенная версия HC-SRF05.
Датчик HC-SR04 — это датчик расстояния, который использует ультразвук для определения расстояния до объекта в диапазоне от 2 до 450 см. Он отличается небольшими размерами, низким энергопотреблением, хорошей точностью и отличной ценой. Модель HC-SR04 является наиболее часто используемым устройством среди ультразвуковых датчиков, главным образом из-за большого количества информации и проектов, доступных в Интернете.
Также можно использовать датчик US-016, который аналогичен HC-SR04, но имеет аналоговый выход. Если же необходим выход UART, то подойдет модель US-100. Ультразвуковой датчик HC-SR04 довольно дешевый. На AliExpress его можно приобрести за 0,65 €.
Для отображения измеряемых значений рекомендуется использовать жидкокристаллический дисплей. Но допускается и подключение небольшого светодиодного индикатора с отображением 3-х символов, что будет достаточным для демонстрации значения расстояния в сантиметрах.
Номинальный диапазон измерений датчика HC-SR04 составляет от 2 до 400 см. Однако, на практике фактический диапазон измерений является более ограниченным: от 20 см до 2 метров. Характеристики датчика HC-SR04:
- Рабочее расстояние: 2 см — 400 см;
- Частота звука: 40 кГц;
- Эффективный угол: 15º;
- Напряжение питания: 5 В;
- Потребляемый ток: 15 мА.
Датчик HC-SR04 имеет два преобразователя: пьезоэлектрический передатчик и приемник. Принцип работы заключается в следующем: передатчик испускает 8 ультразвуковых импульсов на частоте 40 кГц. Звуковые волны распространяются в воздухе и при обнаружении объекта отражаются от него и улавливаются приемником.
Время задержки волны с момента ее излучения до момента ее обнаружения измеряется микроконтроллером и, таким образом, можно рассчитать расстояние к объекту. На функционирование датчика не влияют солнечный свет или цвет материала. Но при обнаружении акустически мягких материалов, таких как ткань или шерсть, могут возникнуть трудности.
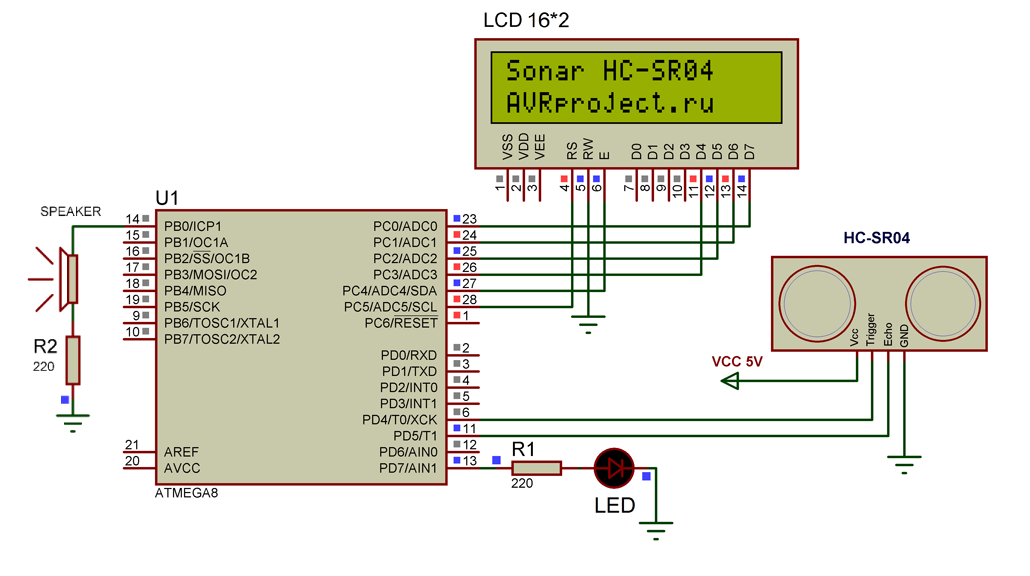
Для измерения расстояний с помощью датчика HC-SR04 следует подключить его к контроллеру Arduino. Ультразвуковой дальномер, схема подключения которого приведена выше, собрать довольно просто. После этого нужно написать программу, скомпилировать ее и загрузить в контроллер Arduino.
Для написания программы рекомендуется использовать библиотеку NewPing, доступную в менеджере библиотек IDE Arduino. Она предоставляет ряд дополнительных функций, в том числе подключение медианного фильтра для устранения шума или использование одного вывода в качестве триггера и эха. Ниже приводится один из вариантов программы с использованием данной библиотеки.
![Ультразвуковой дальномер hc-sr04: подключение, схема и примеры работы [амперка / вики]](https://workpl.ru/wp-content/uploads/1/9/2/192ce06ffdd5389cf32efd5d57fb12a6.jpeg)

Датчик имеет следующие разъемы:
- Vcc — для подключения цепи +5В.
- Trig — цифровой вход. На него подается сигнал для начала измерительного цикла. Обычно сигнал логической единицы устанавливают на 10 мкс.
- Echo — цифровой выход. Когда измерение закончится, на данном выходе появится сигнал логической единицы на время, соответствующее измеренному расстоянию.
- GND — для подключения цепи -5В.
Важным нюансом, который следует учитывать, чтобы избежать ошибочных результатов, является время между циклами измерения. Рекомендуется делать задержку не менее 60 мс перед каждым измерением.
KY-002, датчик вибрации SW-18015P
|
|
| Датчик вибрации стоит около 7 р, сама плата датчика от 60 р за шт. |
| Применяется в схемах где необходимо слежение за вибрацией, т.е., например, в схемах автосигнализации на вибрацию корпуса или в производственных схемах за слежением вибрации. У меня такого датчика нет но вероятно устройство следующее: представляет собой трубку в трубке, причем внутренняя трубка имеет некоторые свободный ход. Вероятно подвешена на пружине (в принципе изготовление «на коленке» займет от силы 10 минут). При вибрации внутренняя трубка начинает колебаться и, таким образом, касается стенок наружной трубки. Эти касания подают на выход датчика логический ноль, в то время как в состоянии отсутствия вибрации на выходе логическая единица. Пример обработки сигналов дачтчика вибрации можете посмотреть ЗДЕСЬ. |
 KY-002 внешний вид
KY-002 внешний вид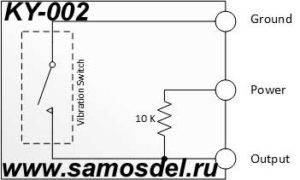 KY-002 схема датчика
KY-002 схема датчикаИнструменты
Чтобы лишний раз не бегать в магазин прямо посреди процесса сборки системы, лучше заранее подготовить все инструменты, что могут вам пригодиться. Так, стоит побеспокоиться, чтобы под рукой были:
- Паяльник. Хорошим выбором станут приборы с регулируемой мощностью, их можно приспособить к любой ситуации.
- Проводники. Естественно, датчик необходимо будет подсоединять к МК, и для этого не всегда подходят стандартные пины.
- Переходник под usb-порт. Если на вашем микроконтроллере нет встроенного порта, побеспокойтесь о том, чтобы его можно было подключить к ПК другим способом. Ведь вам необходимо будет подгружать дополнительные библиотеки и новую прошивку в ваш проект.
- Припой, канифоль и прочие мелочи, в том числе изолированное рабочее пространство.
- Сам чип и МК, а также, при необходимости, корпус будущего устройства. Наиболее опытные инженеры предпочитают распечатывать оболочку для своих проектов на 3Д принтере, однако, если вы живёте в крупном городе, не обязательно тратиться. Можете поискать компании, дающие в аренду принтеры.
Стоит понимать, что дальномер Arduino относится к приборам бесконтактного типа и способен обеспечивать точные измерения. Но всё же не стоит забывать, что профессиональные устройства используют совершенно другие технологии и проходят длительную калибровку под все материалы, а соответственно, в любом случае, окажутся лучше. Также у нашего проекта будет ограниченный диапазон измерения расстояний, от 0.03 до 4 метров, что подойдёт не во всех случаях.
Но, что хорошо, на работу устройства не оказывается никакого влияния со стороны ЭМ излучений и солнечной энергии. А в комплекте к датчику уже находятся нужные ресиверы и трансмиттеры, которые пригодятся, когда вы будете собирать ультразвуковой дальномер Ардуино.
Важно! В нашем уроке можно будет ничего не паять, т.к. мы будем использовать макетную плату и провода-перемычки
Но если вы захотите в итоге собрать законченное устройство – вам пригодится всё что мы указали выше.
Скетч для компьютера

Если при запуске появится сообщение, что не найдено Android SDK:

можно проигнорировать это сообщение и просто закрыть окно, нажав на крестик. Только при когда отобразиться окно программы, нужно будет переключить среду Processing из режима работы «Android» в режим «Java». Для этого слева вверху нажмите на «Android»:

И в появившемся меню выберете пункт «Java»:
После чего среда автоматически перезапустится:
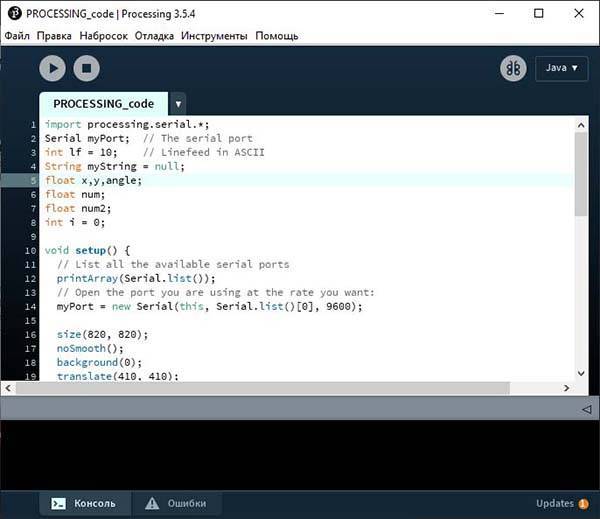
Создайте новый скетч (файл -> создать) и скопируйте в него скетч:
Одно из отличий Processing от Arduino IDE заключается в том, как выбирается последовательный порт. В Processing порт выбирается не в меню, а в коде по индексу массива. При запуске скетча, внизу окна выводится список портов:
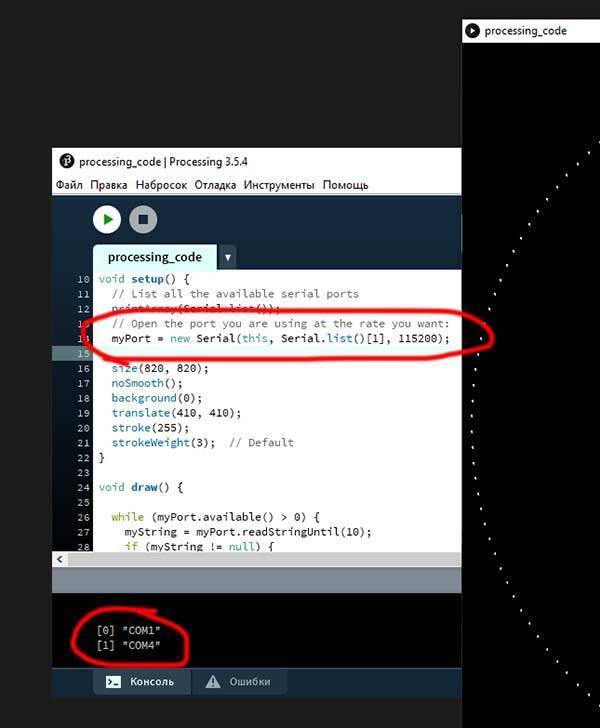
Найдите в списке порт, к которому подключена Arduino и в строчке:
myPort = new Serial(this, Serial.list(), 115200);
при необходимости поменяйте индекс. Если к примеру текущий порт «COM4», замените в коде ноль на единицу:
myPort = new Serial(this, Serial.list(), 115200);
https://vk.com/video_ext.php
Перевод: RobotoTehnika.ru
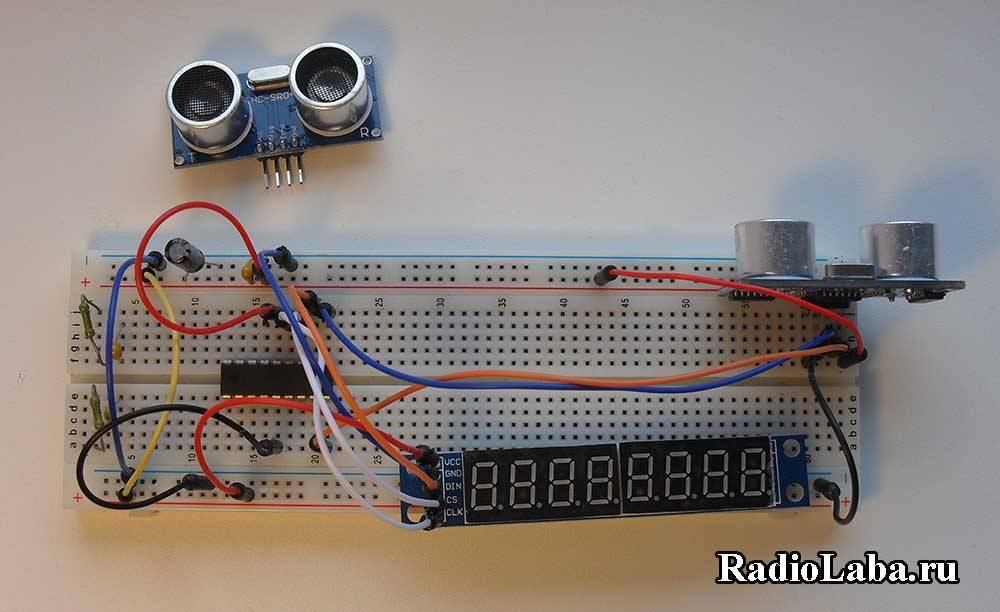
Скетч ультразвукового дальномера на arduino с помощью HC-SR04 и TM1637
// подключение индикатора TM1637
#include <TM1637.h>
#define CLK 3
#define DIO 2
TM1637 tm1637(CLK,DIO);
// пины для HC-SR04
int echoPin = 12;
int trigPin = 11;
void setup() {
Serial.begin (9600); // для вывода в мониторе порта
pinMode(trigPin, OUTPUT); // пин отправки сигнала
pinMode(echoPin, INPUT); // пин приема сигнала
// инициализация индикатора
tm1637.init();
tm1637.set(BRIGHT_TYPICAL);
}
void loop() {
int duration, mm; // переменные для хранения расстояния
// останавливаем отправку сигнала
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// отправляем ультрозвуковой сигнал
digitalWrite(trigPin, HIGH);
// ждем 10 микроскунд
delayMicroseconds(10);
// останавливаем отправку сигнала
digitalWrite(trigPin, LOW);
// замеряет длину положительного импульса на пине echoPin
duration = pulseIn(echoPin, HIGH);
// высчитываем расстояние до препядствия
mm = duration / 5.8;
// вывод данных в монитор порта
Serial.print(mm);
Serial.println(" mm");
// вывод данных на индикатор
tm1637.display( mm );
delay(100);
}
Основные причины для монтажа лазерного дальномера
Пользоваться механической рулеткой не всегда удобно. Порой она не дает положительного эффекта. В последние 10 лет все большее предпочтение отдается электронным дальномерам. К этой группе приборов, которые измеряют расстояние при помощи электроники, относятся:
- лазерный дальномер;
- ультразвуковой дальномер.
Все эти приборы функционируют по принципу бесконтактного метода. Такой дальномер своими руками сегодня создают отечественные мастера. Приборы работают не хуже тех, которые были выпущены в заводских условиях.
Лазерный дальномер, сделанный своими руками, состоит из нескольких частей:
- плата;
- микроконтроллер;
- усилитель лазерного сигнала;
- лазер;
- фотоприемник;
- фильтр.
Довольно сложно получить такой сигнал, имеющий частоту 10 МГц. Простой контроллер здесь не подходит. Для этого лучше использовать меандр, у которого имеется нужная частота. Когда усиливается сигнал, приходящий из фотоприемника, удаляются ненужные гармоники специальным полосовым фильтром, который функционирует на частоте 10 МГц. На выходе появляется сигнал, сильно напоминающий синусоидальный.
Чтобы изготовить дальномер своими руками можно за основу взять схему лазерной связи. В данном случае передача данных происходит очень быстро, скорость равна 10 Мбит. Такая величина соответствует имеющейся частоте модуляции.
Для такого лазерного устройства берется самый простой усилитель мощности. Он состоит из одной микросхемы 74HC04, которая собрана из шести инверторов. Подача тока ограничивается специальными резисторами. Однако умельцы могут заменить резисторы более надежными деталями.
Пусконаладочная плата становится источником 5-вольтового напряжения. Таким образом усилитель получает питание. Чтобы убрать наводки сигнала на другую часть электрической схемы, усилительный корпус делается стальным, каждый провод экранируется.




В качестве лазера выступает привод, установленный в DVD-приставках. Такое устройство имеет вполне достаточную мощность для функционирования на частоте, достигающей 10 МГц.
В состав приемника входит:
- фотодиод;
- усилитель.
В состав усилителя входит полевой транзистор, специальная микросхема. Когда увеличивается расстояние, происходит падение освещенности фотодиода. Поэтому необходимо иметь мощное усиление. Собираемая схема позволяет достичь 4000 единиц.
Когда увеличивается частота, начинают уменьшаться сигналы фотодиода. Усилитель подобной конструкции является главной и сильно уязвимой частью. Его настройка требует очень высокой точности. Желательно отрегулировать коэффициент усиления таким образом, чтобы получать максимальные значения. Самым простым способом будет подача на транзистор 3 В. Можно установить обыкновенную батарейку.
Чтобы приемник начал работать, необходимо подать 12 В. Для этого устанавливается специальный блок питания.
У такого усилителя высокая чувствительность к любым наводкам, поэтому его нужно обязательно экранировать. Можно для этого воспользоваться корпусом оптического датчика. Экранирование фотодиода можно сделать из обычной фольги.
Описанная выше система позволит создать самодельный лазерный дальномер в бытовых условиях.
Ремонт лазерного дальномера
Если повреждения несут в основном физический характер, а электроника работает исправно, прибор можно восстановить самостоятельно, при наличии желания и смекалки. В первую очередь необходимо установить источник проблемы, исходя из имеющегося дефекта. В данной теме, мы рассмотрим 2 случая поломок на конкретных моделях, и приведем рекомендации по их устранению.
В качестве первого пациента выступает дальномер Bosch DLE 50, с поврежденной фокусировкой луча в следствии падения со 2-го этажа. Вместо сконцентрированной точки, лазер принял форму фонарика с размытым пятном света. Измерительная способность устройства сократилась до 70 см, и при попытке измерения больших расстояний дисплей отображает ошибку “Error”. Задача заключается в калибровке фокусирующей линзы по отношению к измерительному каналу. Все элементы расположены внутри корпуса, поэтому разбирать необходимо.
Вполне вероятно, что производители модели Bosch DLE 50, исключили надобность в самостоятельном ремонте ещё на стадии проектирования. Корпус прибора, имеет всего 3 внешних резьбовых соединения (2 под батарейками и 1 на откидной скобе), в то время, как остальные элементы спаяны или приклеены. Разумеется, в гарантийном сервисе, разборка и сборка подобного монолита происходит без проблем, однако в быту этот процесс может вызвать затруднение. Потребуется паяльник, для отсоединения контактов питания, и термофен, для снятия приклеенной клавиатуры. Все соединительные элементы, представлены на приведенных ниже фотографиях, в порядке разборки инструмента.
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
В статье я расскажу о том, как я делал лазерный дальномер и о принципе его работы. Сразу отмечу, что конструкция представляет собой макет, и ее нельзя использовать для практического применения. Делалась она только для того, чтобы убедится в том, что фазовый дальномер реально собрать самому.
Теория
Видео работы дальномера:
Дальность работы у получившегося дальномера вышла достаточно небольшая: 1,5-2 м в зависимости от коэффициента отражения объекта.
Для того, чтобы увеличить дальность, можно использовать специальный отражатель, на который нужно будет направлять луч лазера.
Для экспериментов я сделал линзовый отражатель, состоящий из линзы, в фокусе которой расположена матовая бумага. Такая конструкция отражает свет в ту же точку, откуда он был выпущен, правда, диаметр луча при этом увеличивается.
Фотография отражателя:
Использование отражателя:
Как видно, расстояние до отражателя – 6.4 метра (в реальности было примерно 6.3). Сигнал при этом возрастает настолько, что его приходится ослаблять, направляя луч лазера на край отражателя.
Точность получившегося дальномера – 1-2 сантиметра, что соответствует точности измерения сдвига фаз – 0,2-0,5 градуса. При этом, для достижения такой точности, данные приходится слишком долго усреднять – на одно измерение уходит 0.5 сек. Возможно, это связано с использованием PLL для формирования сигналов – у него довольно большой джиттер. Хотя я считаю, что для самодельного макета, аналоговая часть которого сделана довольно коряво, в котором присутствуют достаточно длинные провода, даже такая точность – довольно неплохо.
Отмечу, что я не смог найти в Интернете ни одного существующего проекта фазового дальномера (хотя бы со схемой конструкции), что и послужило причиной написать эту статью.
Теги:
- лазерный дальномер
- stm32
- stm32f4discovery
Этот прибор, который до сих пор считается уникальным, смог найти применение практически во всех сферах человеческой жизни. Сегодня лазерный дальномер можно увидеть в руках геологов и геодезистов. Иными словами, в тех областях человеческой деятельности, где необходимо замерить расстояние с особой точностью. Поэтому высокую популярность завоевали лазерные рулетки, отличающиеся высокой точностью, повышенной надежностью и вполне доступной ценой. Вполне естественно звучит вопрос, можно ли сделать дальномер лазерный своими руками.
К группе приборов, которые измеряют расстояние при помощи электроники, относятся: лазерный дальномер, ультразвуковой дальномер.
Измерения лазерным дальномером делаются на основе световых потоков, носителем сигнала является электромагнитное излучение, окрашенное в соответствующий оттенок. В большинстве случаев за основу берется красный свет.
Согласно законам физики, скорость света намного превышает скорость звука, поэтому и время измерения одинакового расстояния будет отличаться.





